Capture images and stream video from Raspberry Pi cameras using rpicam-apps and OpenCV. Perfect for computer vision, surveillance, and image processing applications.
Overview
The hardware-camera skill provides comprehensive camera control for Raspberry Pi Camera modules. Built on rpicam-apps and OpenCV, it offers high-quality image capture, video streaming, and frame processing capabilities ideal for computer vision projects.
Features
- Image Capture - High-resolution photo capture
- Video Streaming - Real-time video feed
- Frame Processing - OpenCV integration
- Multiple Resolutions - From 640x480 to 4608x2592
- Camera Controls - Exposure, brightness, contrast
- Format Support - JPEG, PNG, RAW
- Preview Mode - Live preview before capture
Prerequisites
- Raspberry Pi Camera Module (v1, v2, v3, or HQ)
- Camera enabled in raspi-config
- rpicam-apps installed
- User in
videogroup - Camera connected to CSI port
Usage
Basic Commands
# Capture image
/hardware-camera capture --output photo.jpg
# Capture with specific resolution
/hardware-camera capture --output image.jpg --resolution 1920x1080
# Record video
/hardware-camera record --output video.mp4 --duration 10
# Take photo with preview
/hardware-camera capture --output photo.jpg --preview 5
# List camera information
/hardware-camera infoAdvanced Options
# Capture with custom settings
/hardware-camera capture \
--output photo.jpg \
--resolution 4608x2592 \
--quality 95 \
--exposure auto \
--brightness 50
# Record video with settings
/hardware-camera record \
--output video.h264 \
--duration 30 \
--framerate 30 \
--bitrate 10000000
# Time-lapse capture
/hardware-camera timelapse \
--output timelapse_%04d.jpg \
--interval 5 \
--count 100
# Stream video
/hardware-camera stream --port 8000Python API
Basic Capture
from distiller_sdk import Camera
# Initialize camera
camera = Camera()
# Capture image
camera.capture("photo.jpg")
# Capture with resolution
camera.capture("photo.jpg", resolution=(1920, 1080))
# Capture to buffer
image_data = camera.capture_to_buffer()Video Recording
from distiller_sdk import Camera
camera = Camera()
# Record video
camera.record("video.mp4", duration=10)
# Record with settings
camera.record(
"video.mp4",
duration=30,
framerate=30,
resolution=(1920, 1080)
)Video Streaming
from distiller_sdk import Camera
import cv2
camera = Camera()
# Start streaming
stream = camera.start_stream()
try:
for frame in stream:
# Process frame with OpenCV
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# Display or process
cv2.imshow('Camera', gray)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
finally:
camera.stop_stream()
cv2.destroyAllWindows()Advanced Configuration
from distiller_sdk import Camera, CameraConfig
# Configure camera
config = CameraConfig(
resolution=(1920, 1080),
framerate=30,
brightness=50, # 0-100
contrast=50, # 0-100
saturation=50, # 0-100
sharpness=50, # 0-100
exposure_mode="auto", # auto, manual, night, sports
white_balance="auto", # auto, incandescent, fluorescent, daylight
rotation=0, # 0, 90, 180, 270
hflip=False,
vflip=False
)
camera = Camera(config)
camera.capture("photo.jpg")Camera Modes
Still Capture
from distiller_sdk import Camera
camera = Camera(resolution=(4608, 2592)) # Max resolution
# High quality capture
camera.capture("high_res.jpg", quality=100)
# Fast capture
camera.capture("quick.jpg", quality=75, encoding_speed="fast")Video Mode
from distiller_sdk import Camera
camera = Camera(
resolution=(1920, 1080),
framerate=30
)
# Standard recording
camera.record("video.mp4", duration=60)
# High bitrate
camera.record("video.h264", duration=60, bitrate=20000000)Time-Lapse
from distiller_sdk import Camera
import time
camera = Camera(resolution=(1920, 1080))
# Capture every 5 seconds for 100 frames
for i in range(100):
camera.capture(f"frame_{i:04d}.jpg")
time.sleep(5)
# Or use built-in timelapse
camera.timelapse(
output_pattern="timelapse_%04d.jpg",
interval=5,
count=100
)Live Preview
from distiller_sdk import Camera
camera = Camera()
# Show preview for 5 seconds then capture
camera.preview(duration=5)
camera.capture("photo.jpg")OpenCV Integration
Basic Frame Processing
from distiller_sdk import Camera
import cv2
camera = Camera()
# Capture and process
frame = camera.capture_frame()
# Convert to grayscale
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# Detect faces
face_cascade = cv2.CascadeClassifier(cv2.data.haarcascades + 'haarcascade_frontalface_default.xml')
faces = face_cascade.detectMultiScale(gray, 1.1, 4)
# Draw rectangles
for (x, y, w, h) in faces:
cv2.rectangle(frame, (x, y), (x+w, y+h), (255, 0, 0), 2)
# Save result
cv2.imwrite("faces_detected.jpg", frame)Real-Time Processing
from distiller_sdk import Camera
import cv2
camera = Camera()
stream = camera.start_stream()
while True:
frame = next(stream)
# Edge detection
edges = cv2.Canny(frame, 100, 200)
# Display
cv2.imshow('Edges', edges)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
camera.stop_stream()
cv2.destroyAllWindows()Motion Detection
from distiller_sdk import Camera
import cv2
camera = Camera()
stream = camera.start_stream()
prev_frame = None
while True:
frame = next(stream)
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray, (21, 21), 0)
if prev_frame is None:
prev_frame = gray
continue
# Compute difference
frame_delta = cv2.absdiff(prev_frame, gray)
thresh = cv2.threshold(frame_delta, 25, 255, cv2.THRESH_BINARY)[1]
thresh = cv2.dilate(thresh, None, iterations=2)
# Find contours
contours, _ = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
motion_detected = False
for contour in contours:
if cv2.contourArea(contour) > 500:
motion_detected = True
(x, y, w, h) = cv2.boundingRect(contour)
cv2.rectangle(frame, (x, y), (x+w, y+h), (0, 255, 0), 2)
if motion_detected:
print("Motion detected!")
cv2.imshow('Motion Detection', frame)
prev_frame = gray
if cv2.waitKey(1) & 0xFF == ord('q'):
break
camera.stop_stream()
cv2.destroyAllWindows()Camera Controls
Exposure Control
from distiller_sdk import Camera
camera = Camera()
# Auto exposure
camera.set_exposure_mode("auto")
# Manual exposure
camera.set_exposure_mode("manual")
camera.set_exposure_time(30000) # microseconds
# Scene modes
camera.set_exposure_mode("night") # Low light
camera.set_exposure_mode("sports") # Fast motion
camera.set_exposure_mode("backlight") # Backlit scenesWhite Balance
from distiller_sdk import Camera
camera = Camera()
# Auto white balance
camera.set_white_balance("auto")
# Manual white balance
camera.set_white_balance("incandescent") # Indoor lighting
camera.set_white_balance("fluorescent") # Office lighting
camera.set_white_balance("daylight") # Outdoor
camera.set_white_balance("cloudy") # OvercastImage Adjustments
from distiller_sdk import Camera
camera = Camera()
# Brightness (0-100)
camera.set_brightness(60)
# Contrast (0-100)
camera.set_contrast(50)
# Saturation (0-100)
camera.set_saturation(50)
# Sharpness (0-100)
camera.set_sharpness(50)Rotation and Flip
from distiller_sdk import Camera
camera = Camera()
# Rotate
camera.set_rotation(180) # 0, 90, 180, 270
# Flip
camera.set_hflip(True) # Horizontal flip
camera.set_vflip(True) # Vertical flipResolution Support
Camera Module v3
| Resolution | Aspect | Use Case |
|---|---|---|
| 4608x2592 | 16 | Maximum still |
| 2304x1296 | 16 | High-res video |
| 1920x1080 | 16 | Full HD video |
| 1280x720 | 16 | HD video |
| 640x480 | 4 | Preview/streaming |
Camera Module v2
| Resolution | Aspect | Use Case |
|---|---|---|
| 3280x2464 | 4 | Maximum still |
| 1920x1080 | 16 | Full HD video |
| 1280x720 | 16 | HD video |
| 640x480 | 4 | Preview/streaming |
Technical Details
Performance
| Resolution | FPS | CPU Usage | Use Case |
|---|---|---|---|
| 640x480 | 90 | 15% | Fast processing |
| 1280x720 | 60 | 25% | HD streaming |
| 1920x1080 | 30 | 35% | Full HD video |
| 4608x2592 | 10 | 50% | High-res photos |
Latency
- Still capture: 1-2 seconds
- Video start: 2-3 seconds
- Frame grab: 30-50ms
- Stream processing: 33ms (30fps)
Storage Requirements
- JPEG (1920x1080): ~1-2MB per image
- JPEG (4608x2592): ~4-6MB per image
- H.264 Video (1080p30): ~10MB per minute
- RAW (4608x2592): ~15MB per image
Use Cases
Surveillance Camera
from distiller_sdk import Camera
import cv2
import datetime
camera = Camera(resolution=(1920, 1080))
stream = camera.start_stream()
motion_detected = False
recording = False
video_writer = None
while True:
frame = next(stream)
# Motion detection logic
if detect_motion(frame):
if not recording:
# Start recording
timestamp = datetime.datetime.now().strftime("%Y%m%d_%H%M%S")
filename = f"motion_{timestamp}.mp4"
fourcc = cv2.VideoWriter_fourcc(*'mp4v')
video_writer = cv2.VideoWriter(filename, fourcc, 30, (1920, 1080))
recording = True
print(f"Recording started: {filename}")
if recording:
video_writer.write(frame)
# Stop after 30 seconds of no motion
if not detect_motion(frame):
no_motion_count += 1
if no_motion_count > 900: # 30 seconds at 30fps
video_writer.release()
recording = False
print("Recording stopped")QR Code Scanner
from distiller_sdk import Camera
import cv2
from pyzbar import pyzbar
camera = Camera()
stream = camera.start_stream()
print("Scanning for QR codes...")
while True:
frame = next(stream)
# Decode QR codes
barcodes = pyzbar.decode(frame)
for barcode in barcodes:
# Extract data
data = barcode.data.decode("utf-8")
barcode_type = barcode.type
print(f"Found {barcode_type}: {data}")
# Draw rectangle
(x, y, w, h) = barcode.rect
cv2.rectangle(frame, (x, y), (x+w, y+h), (0, 255, 0), 2)
cv2.imshow("QR Scanner", frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
camera.stop_stream()
cv2.destroyAllWindows()Photo Booth
from distiller_sdk import Camera, LED, AudioPlayer
import time
camera = Camera(resolution=(1920, 1080))
led = LED.create_led_with_sudo(0)
audio = AudioPlayer()
def take_photo():
print("Get ready!")
audio.play("countdown.wav")
# Countdown
for i in range(3, 0, -1):
print(f"{i}...")
led.set_color(255, 255, 0) # Yellow
time.sleep(0.5)
led.off()
time.sleep(0.5)
# Capture
led.set_color(255, 255, 255) # White flash
timestamp = time.strftime("%Y%m%d_%H%M%S")
camera.capture(f"photo_{timestamp}.jpg")
led.off()
audio.play("shutter.wav")
print("Photo captured!")
# Take photo
take_photo()Troubleshooting
Camera Not Detected
# Check camera connection
vcgencmd get_camera
# Should output: supported=1 detected=1
# Enable camera
sudo raspi-config
# Navigate to Interface Options > Camera > Enable
# Check for errors
dmesg | grep -i camera
# Verify user permissions
groups # Should include 'video'Poor Image Quality
# Use maximum resolution
camera = Camera(resolution=(4608, 2592))
# Increase quality setting
camera.capture("photo.jpg", quality=100)
# Adjust image settings
camera.set_sharpness(60)
camera.set_contrast(55)
# Ensure good lighting
camera.set_exposure_mode("auto")Low Frame Rate
# Reduce resolution
/hardware-camera stream --resolution 1280x720
# Lower framerate requirement
/hardware-camera record --framerate 24
# Check CPU usage
htop
# Close other applicationsCamera Lag/Delay
# Reduce buffer size
camera = Camera(buffer_count=1)
# Use lower resolution
camera = Camera(resolution=(1280, 720))
# Reduce processing
# Process every Nth frame instead of every frameBest Practices
- Enable camera in raspi-config - Required before use
- Check lighting - Good lighting improves quality
- Use appropriate resolution - Balance quality vs performance
- Handle resources - Always stop streams when done
- Error handling - Check return values
- Thermal management - Monitor temperature during extended use
- Storage management - Monitor disk space for video recording
Hardware Setup
Camera Connection
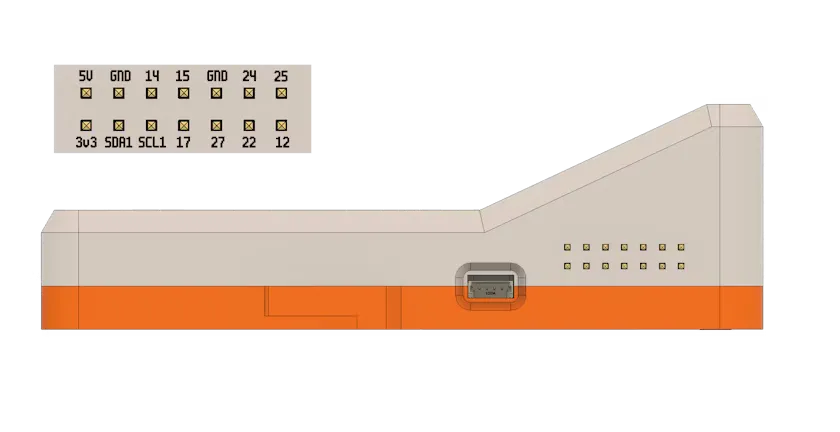
- Power off Raspberry Pi
- Locate camera CSI connector
- Gently pull up on connector tabs
- Insert camera ribbon cable (blue side facing Ethernet port)
- Push tabs down to secure
- Power on Raspberry Pi
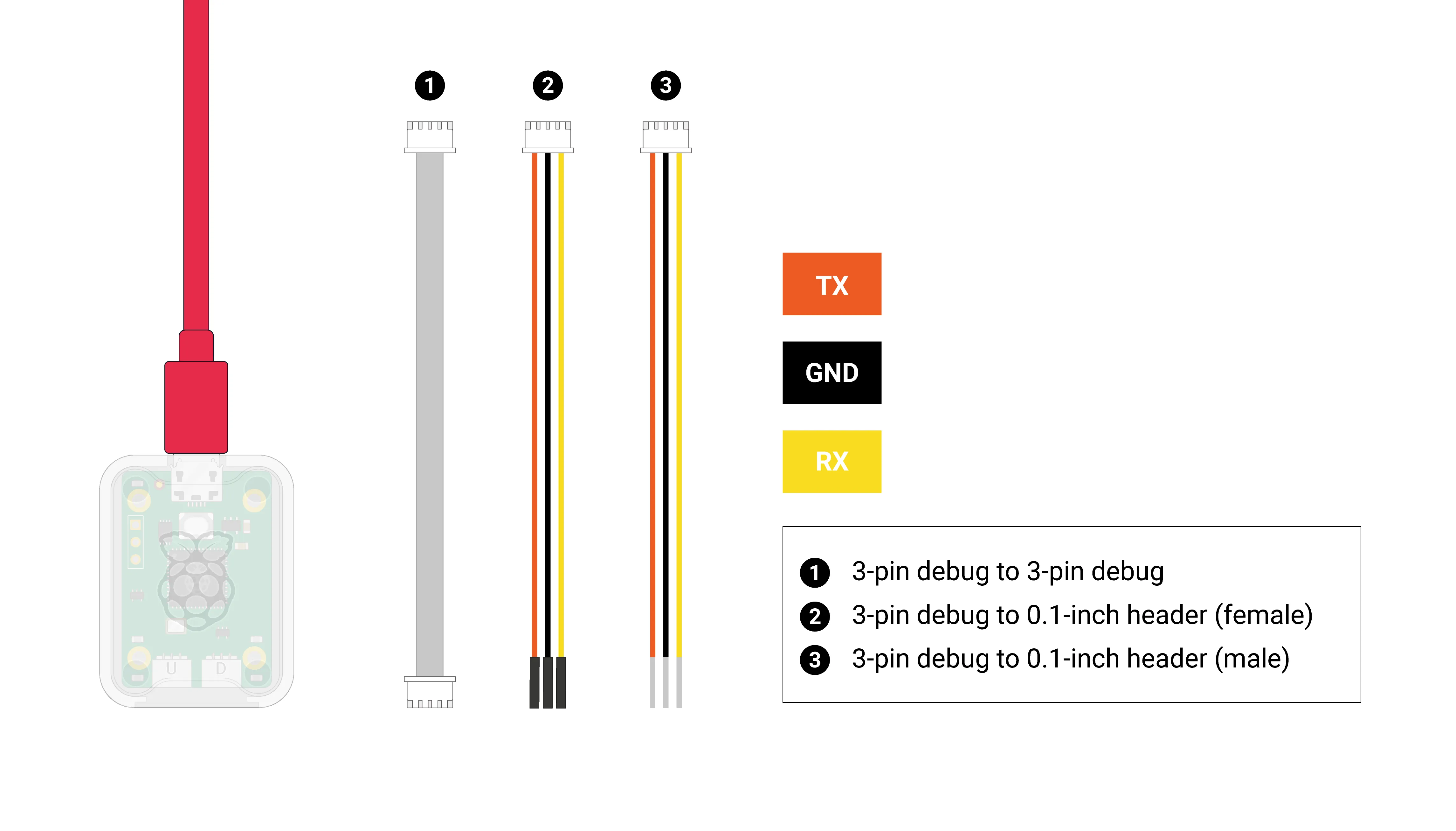
For advanced debugging and development, you can use the Raspberry Pi Debug Probe for serial console access:
Camera Modules
Camera Module v3 (Recommended)
- 12MP Sony IMX708 sensor
- Autofocus
- HDR support
- Better low-light performance
Camera Module v2
- 8MP Sony IMX219 sensor
- Fixed focus
- Good general purpose
HQ Camera
- 12MP Sony IMX477 sensor
- C/CS mount for lenses
- Best image quality
- Requires lens
See Also
- system-verification - Verify camera hardware
- distiller-troubleshooting - Debug camera issues
- hardware-led - Visual indicators for camera operations